Robotic Frame Welding Automation
- Home
- Recent Projects
- Robotic Frame Welding Automation

Project summary
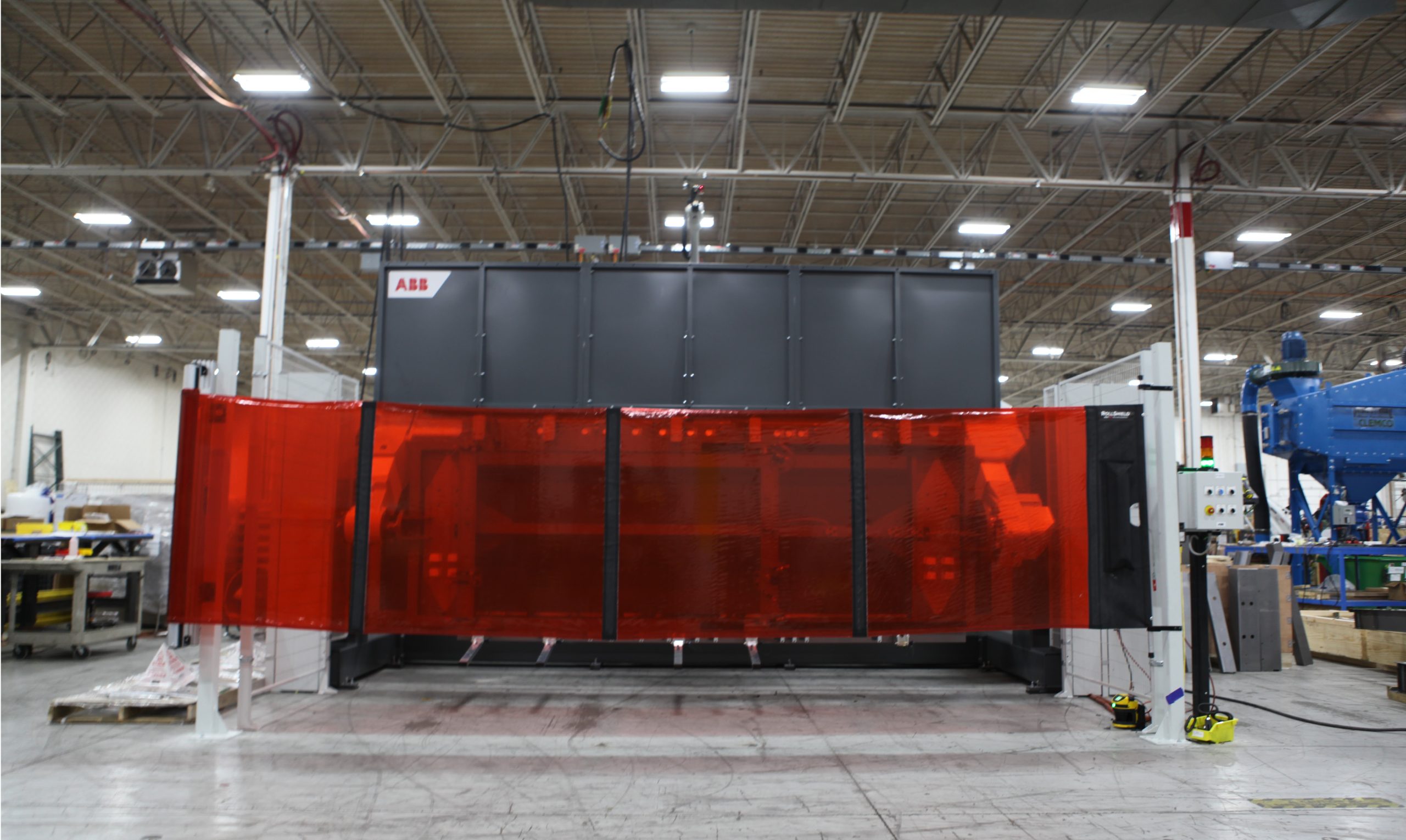
MWES provided this manufacturer with a robot welding cell that manufactures large generator base frames.
The Challenge
Due to a shortage of trained welders and the high costs associated with acquiring them, this firm required an automated solution that would give them improved cycle times and throughput without the need to acquire more costly welders. This firm was seeking an automated robotic welding solution that allowed the operator to tack together their parts on the positioner, as well as have them fully welded by a robot.
The Solution
MWES provided a Standard Ferris Wheel Welding Cell to our customer for the final welding of generator base frames. The system includes an industrial welding robot, a 2-sided interchanging welding positioner and custom-designed fixturing. With the frame components mounted on the fixturing, the welding robot performs the preset welding operation on the frame. As the robot is working, the operator readies another frame into the open fixturing.
The welding cell begins when the operator loads the frame components into the operator side of the Ferris wheel positioner and scans a barcode which signals to the robot which program to call for the next frame to be welded. If a tooling change is required the operator would change the tooling to the corresponding needed setup. The operator tacks members as needed, retracts clamps as required, verifies the correct loading and leaves the station. The operator presses the cycle start, acknowledging the completed loading of the station and that the system is ready for the automatic cycle.
When the system is available the Ferris wheel positioner will index the loaded part into the weld station, the index takes less than 4 seconds then the weld cycle begins. The welding robot starts the frame welding; the positioner will rotate the frame for accessibility to the bottom side as needed. As the robot is performing the welding operations, the operator reenters the load area and repeats the loading and tacking process for the next frame. Upon completing the weld cycle, the Ferris wheel positioner will index the loaded part into the weld station, while simultaneously indexing the welded part out of the weld station. Simultaneously the operator unloads the welded frame and loads the next frame for welding.





Impact to the Customer
The final robotic welding cell that MWES provided to our customer afforded them a number of benefits. Such as reduced rework, increased production throughput, decreased worker injury or downtime and weld quality that is extremely consistent and reliable.
Midwest Engineered Systems has a wide range of experience in building robotic weld cells. If you’re looking to improve your welding automation throughput, we have the knowledge and experience to make the project a success.
Contact us to learn how Midwest Engineered Systems can automate even your most complex and challenging operations today!
Innovation Through Automation
Client Details
A Fortune 1000 American manufacturer of backup power generation products.