Bin Picking




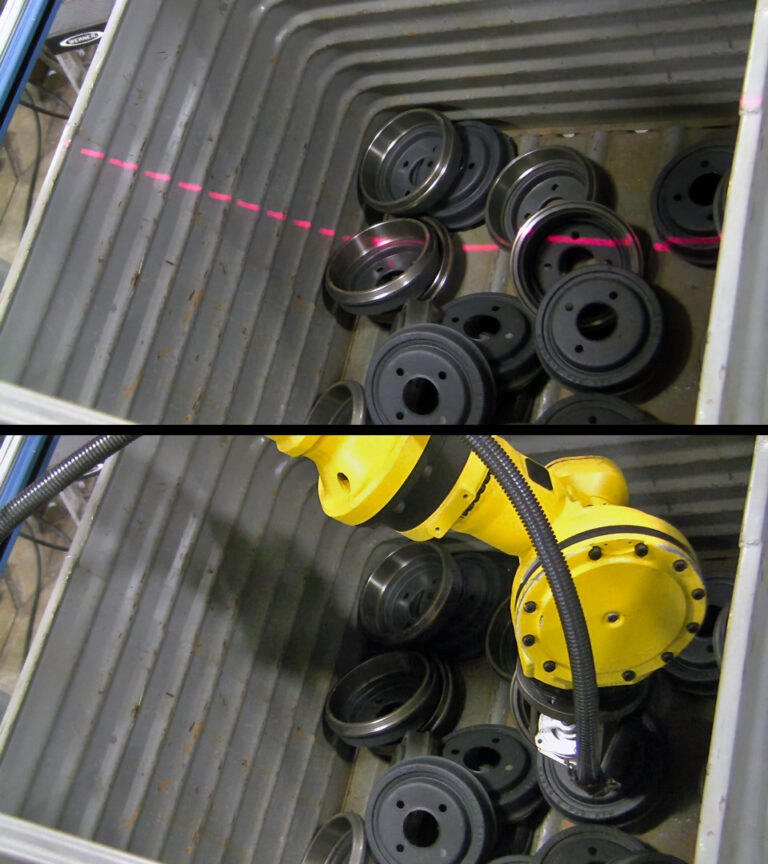
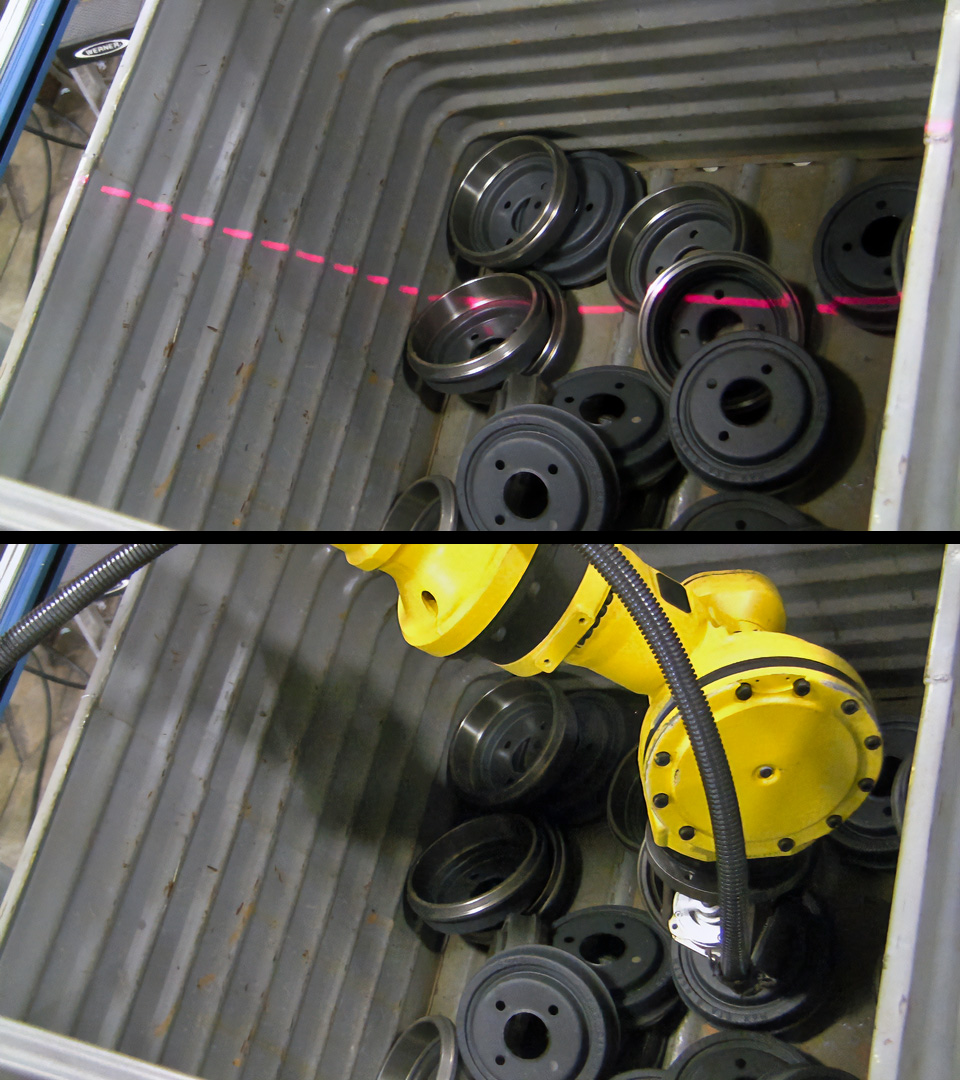
The MWES robotic bin picking systems are designed to distinguish parts of different shapes regardless of surface finish, shine, rust or color and can locate the top edge of the bin to adjust for bin placement variations along with alerting the operator if the bin is empty or if any foreign debris is detected in the bin.
Robotically Automate Random Bin Picking
With structured bin picking, the parts are ordered into predefined locations. During the unloading portion of the manufacturing process, this sort of picking is usually less costly and simpler as opposed to random bin picking.
Robotic random bin picking technology allows for containers to be bulk-filled with parts that have just cleared through manufacturing cells. This sort of bin picking technology can send bins to downstream operations, set each bin in place and thus keep the automated manufacturing running smoothly.
Robotic random picking is typically witnessed in industries that automate the manufacturing processes of stamping, creating molded plastics and creating medical assemblies. With robotic bin-picking cells, the part to be picked by the robot must be inspected concerning size, shape and material.
Factors such as picking and placing parts have to be included in the determination of these sorts of cells. Normally, parts are picked up from a bin at a rate between 6–15 parts per minute. Randomly placed parts can be stored in a variety of bin sizes and types, such as trays, wire mesh containers or plastic totes.
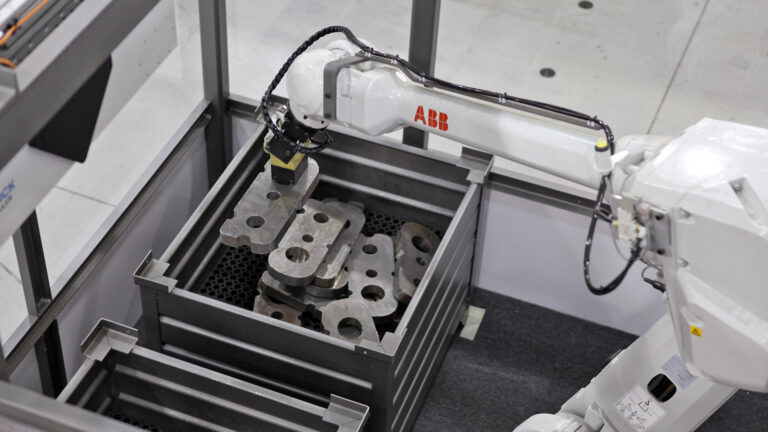
Robotic Dynamic Vision Bin Picking
Dynamic vision picking is a technique that enables robots to manipulate objects in unstructured environments using visual feedback. It involves using cameras and sensors to detect the position, orientation, shape and size of the objects, and then planning and executing a motion that can grasp them without collision. Robot dynamic vision picking can be applied to various domains, such as logistics, manufacturing, agriculture and service. It can improve the efficiency, accuracy and flexibility of robot manipulation tasks.
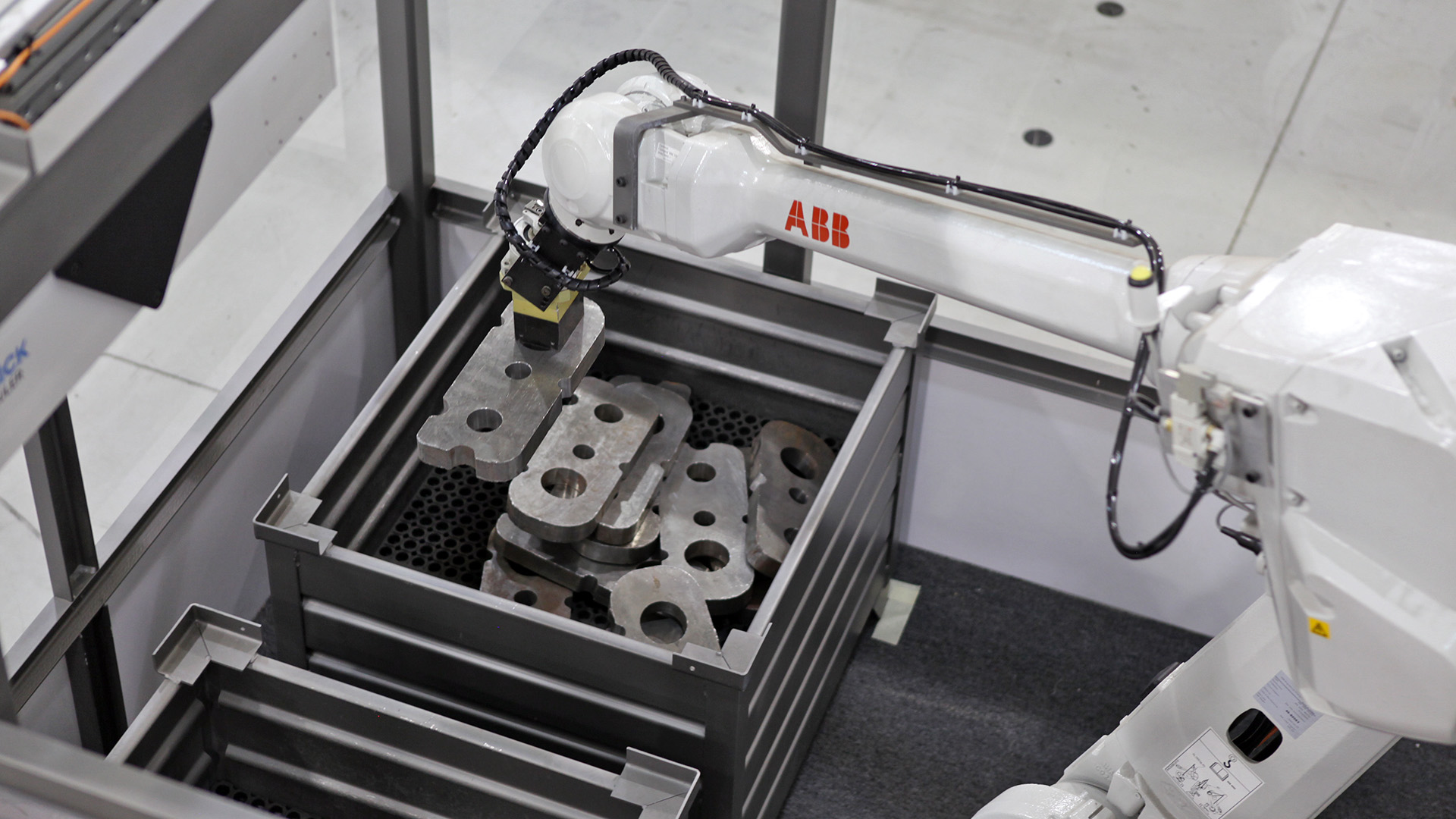
3D vision systems and tools using flexible end-of-arm-tool (EOAT) systems are utilized to configure many bin setups:
- Can remove tier sheets, used to separate part layers
- Able to perform accurate final part placements
- Quality control capabilities for parts that are mismatched with defined specifications
- Capable of working with tall bins that must be emptied
- Can discover appropriate pick patterns for bin parts that were placed randomly
- Able to deal with a variety of part weights, shapes, materials and sizes
Where Robot Bin Picking is useful for Manufacturing Applications
There are many benefits for companies that choose to transition to robotic random picking automation. Among those benefits are:
- Incredibly versatile and adaptable regarding part shape, size and material
- Vision scanning reduces the chance of missed picks and can determine the part orientation
- Increase throughput rate with cycle times typically 4-10 seconds per bin pick
- Increased productivity due to fast cycle times and unmanned shifts with faster retooling to new part types
- Easy to work with and train to operate which will help a reduction in costs
- Reduction in workplace accidents, such as falling workpieces, crushing risks and repetitive motion injuries
- The longevity of the robotic random bin picking system can be achieved through preventative maintenance and regular inspection
If your bin picking operation is still dependent on a manual labor force, then a robotic bin picking is the solution to throughput varinces. Contact us today and speak with one of our applications engineers to see how robotics can improve your process.











{kind=link}
{kind=link}
{kind=link}