SCARA Robots: Precision and Speed for Industrial Automation
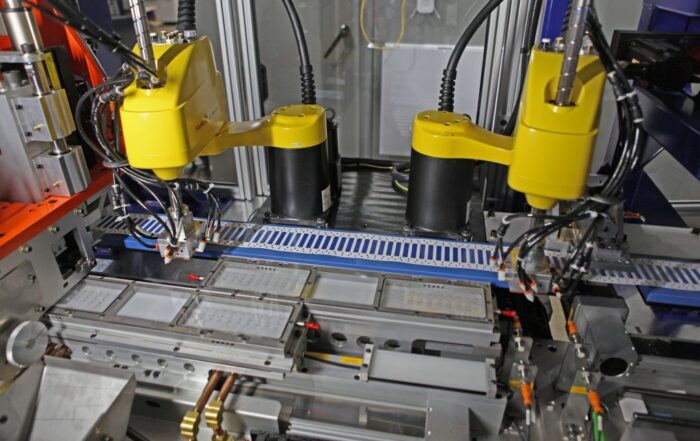
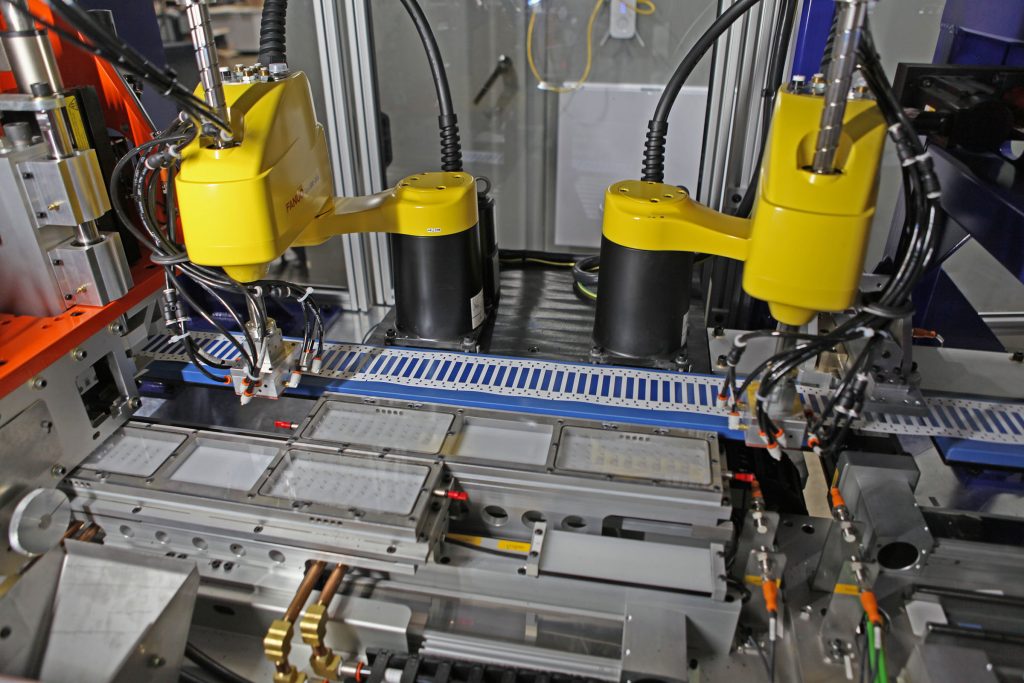
SCARA (Selective Compliance Assembly Robot Arm) robots are specialized four-axis industrial robots designed for high-speed, precise tasks in confined spaces. Their unique design—rigid in the vertical (Z) axis and flexible in the horizontal (X-Y) plane—makes them ideal for applications requiring rapid and accurate movements.
Key Features of SCARA Robots
- High-Speed Operation: SCARA robots are among the fastest industrial robots, second only to delta robots. Their four-axis configuration allows for quick and agile movements, making them suitable for high-throughput applications.
- Precision Handling: The rigid Z-axis ensures minimal vertical deflection, providing high precision in tasks such as assembly and material handling.
- Compact Design: Their small footprint and ability to be mounted on walls or ceilings save valuable floor space, making them ideal for environments with limited room.
- Cost-Effective: Due to their simpler design and fewer components, SCARA robots are generally more affordable than other types of industrial robots, offering a high return on investment.
Common Applications
SCARA robots excel in various industries, including:
- Electronics Assembly: Handling delicate components with precision.
- Pick-and-Place Operations: Rapidly moving items from one location to another.
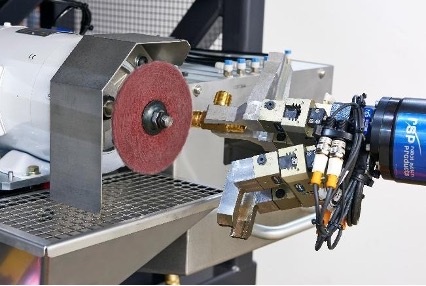
- Dispensing: Applying adhesives, sealants, or coatings with accuracy.
- 3D Printing: Automating small-scale additive manufacturing processes.
- Packaging and Palletizing: Efficiently organizing products for shipment.
Considerations
While SCARA robots offer numerous advantages, it’s essential to consider:
- Limited Payload Capacity: Typically, SCARA robots can handle loads up to 10 kg, making them unsuitable for heavy-duty tasks.
- Restricted Range of Motion: Their design limits movement to the X-Y plane, which may not be suitable for applications requiring complex spatial movements.
Industries Benefiting from SCARA Robots
SCARA robots are widely used in:
- Automotive: For tasks like screw assembly and part insertion.
- Food and Beverage: Automating packaging and labeling processes.
- Medical Devices: Assembling small, precise components.
- Consumer Electronics: Handling delicate parts in assembly lines.
MWES SCARA Solutions
At MWES, we provide tailored SCARA robot solutions to meet your specific automation needs. Our expertise ensures seamless integration into your production lines, enhancing efficiency and precision.