
Industrial Cylinder Heads Assembly Automation
- Home
- Recent Projects
- Industrial Cylinder Heads Assembly Automation
Project summary
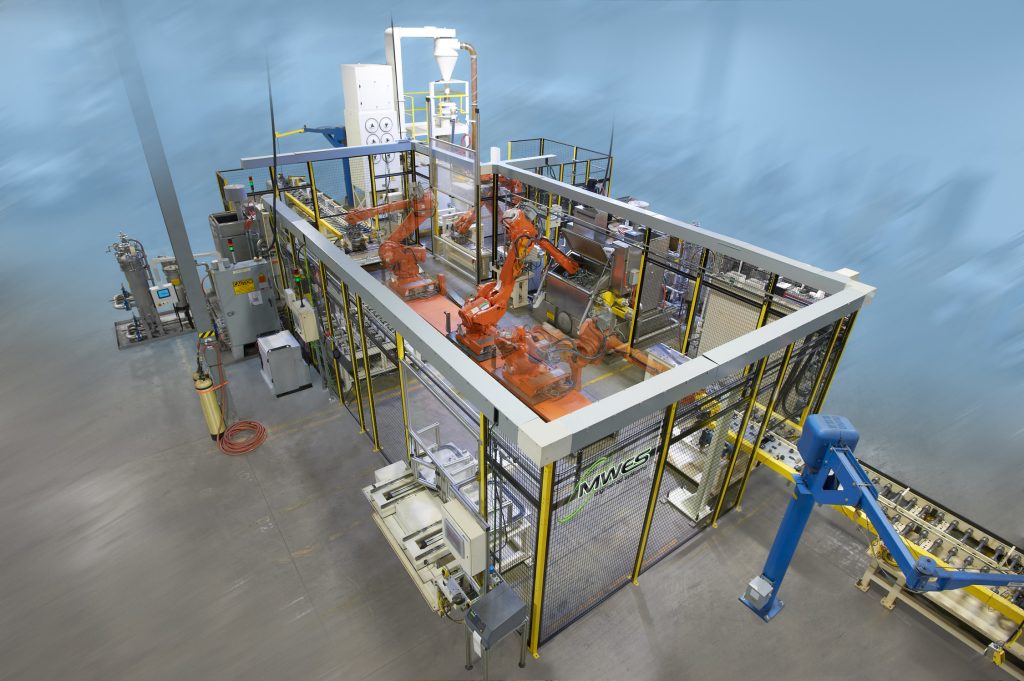
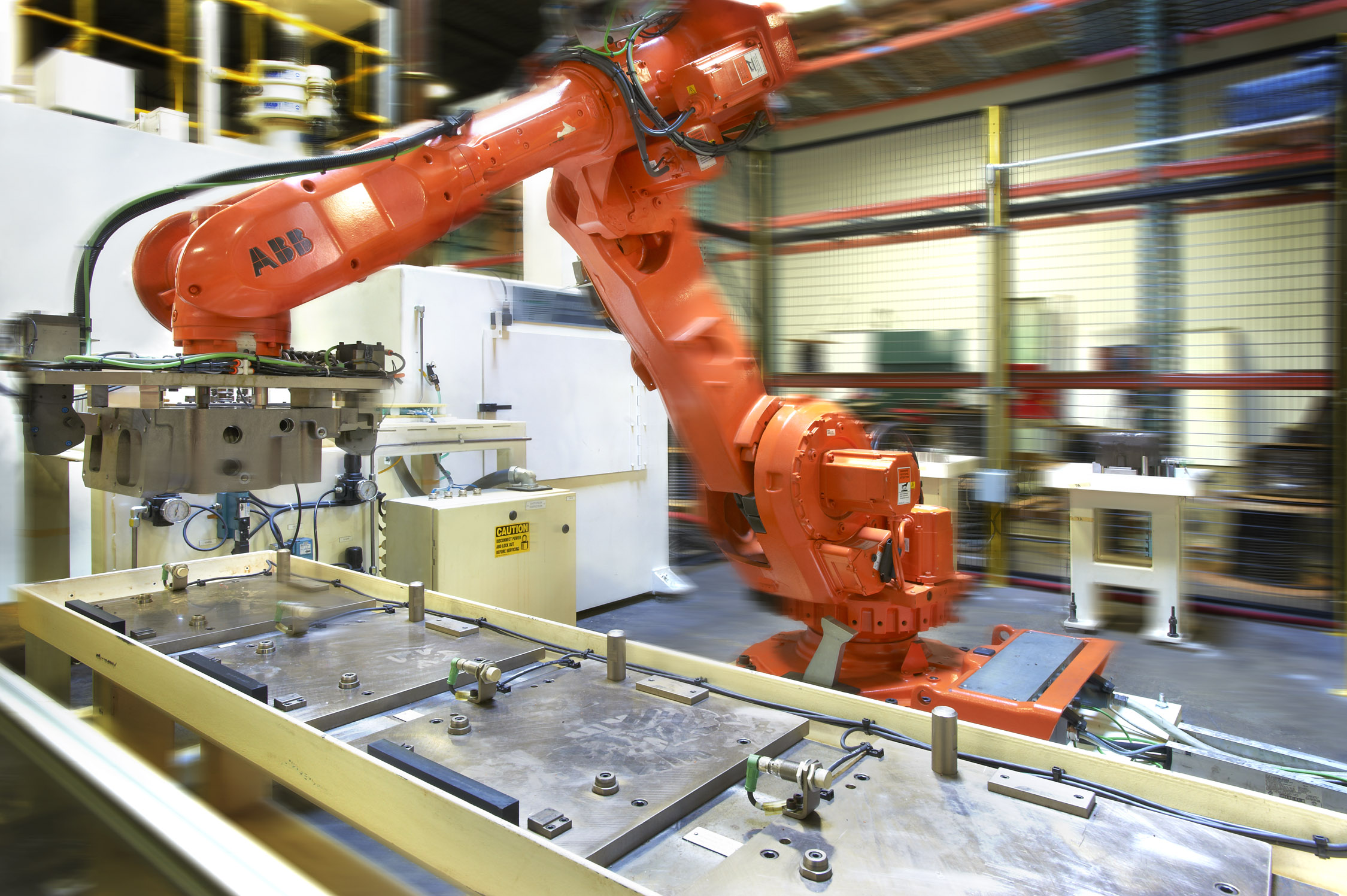
MWES provided a fully automated robot cell that would process four different models of diesel cylinder heads as part of a larger assembly line.
The Challenge
Processing large industrial engine components while keeping up with an assembly line is a difficult task for a manual labor workforce. For that reason, this firm came to MWES looking to integrate a robot cell that would process diesel engine cylinder heads. The process required that the parts be put through a cleaning and peening process. This robot cell would also need to integrate into an existing engine assembly line that the customer already has in operation.
The Solution
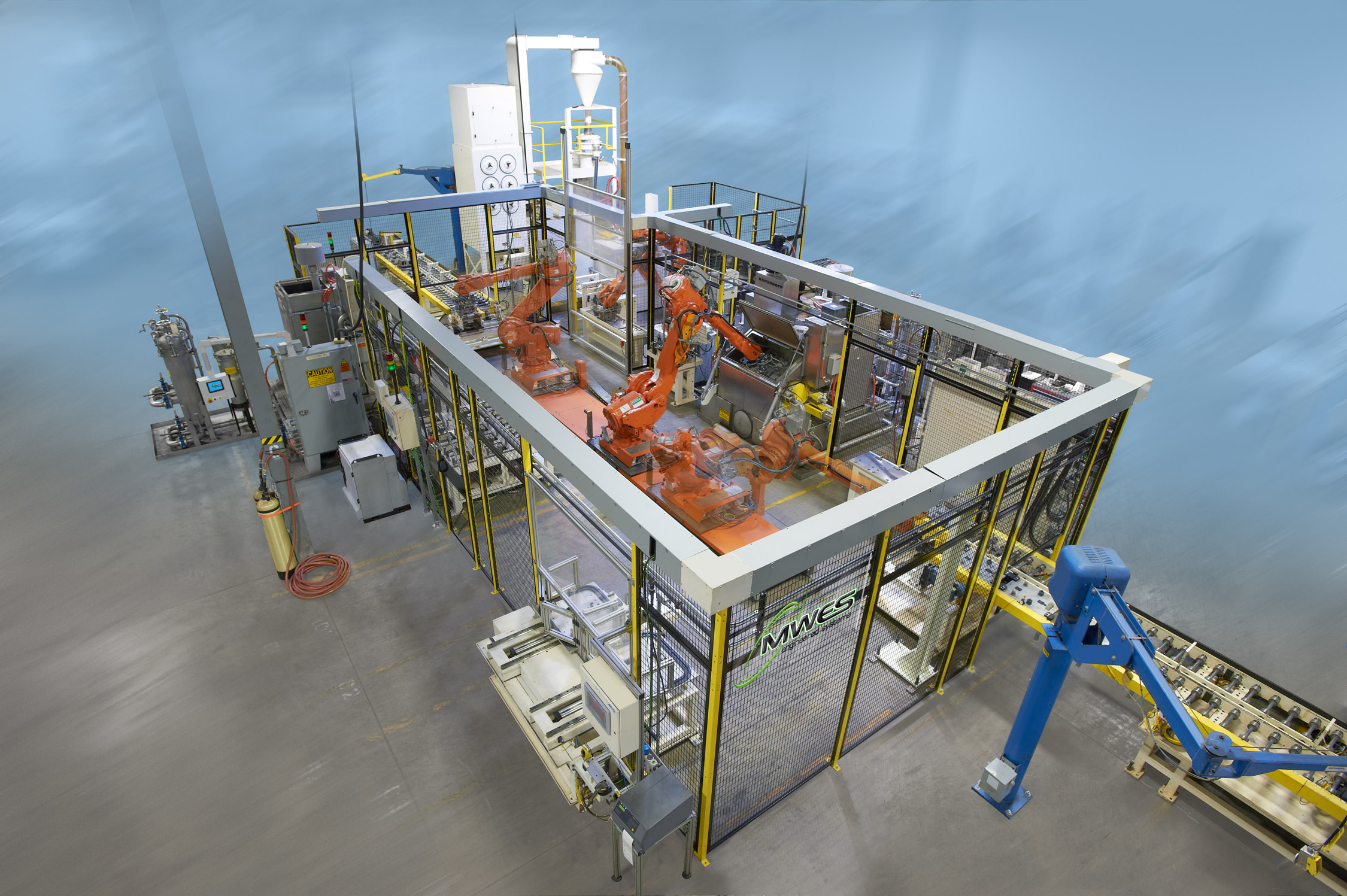
MWES provided our customer with a robot automation cell that would utilize a track-mounted robot, infeed and outfeed conveyors, a second robot to handle the peening process, and a part cleaning station. The system would accept parts that come in via the infeed conveyor and the track-mounted robot would pick the part and run it through a cleaning process before placing the part in the peening station.
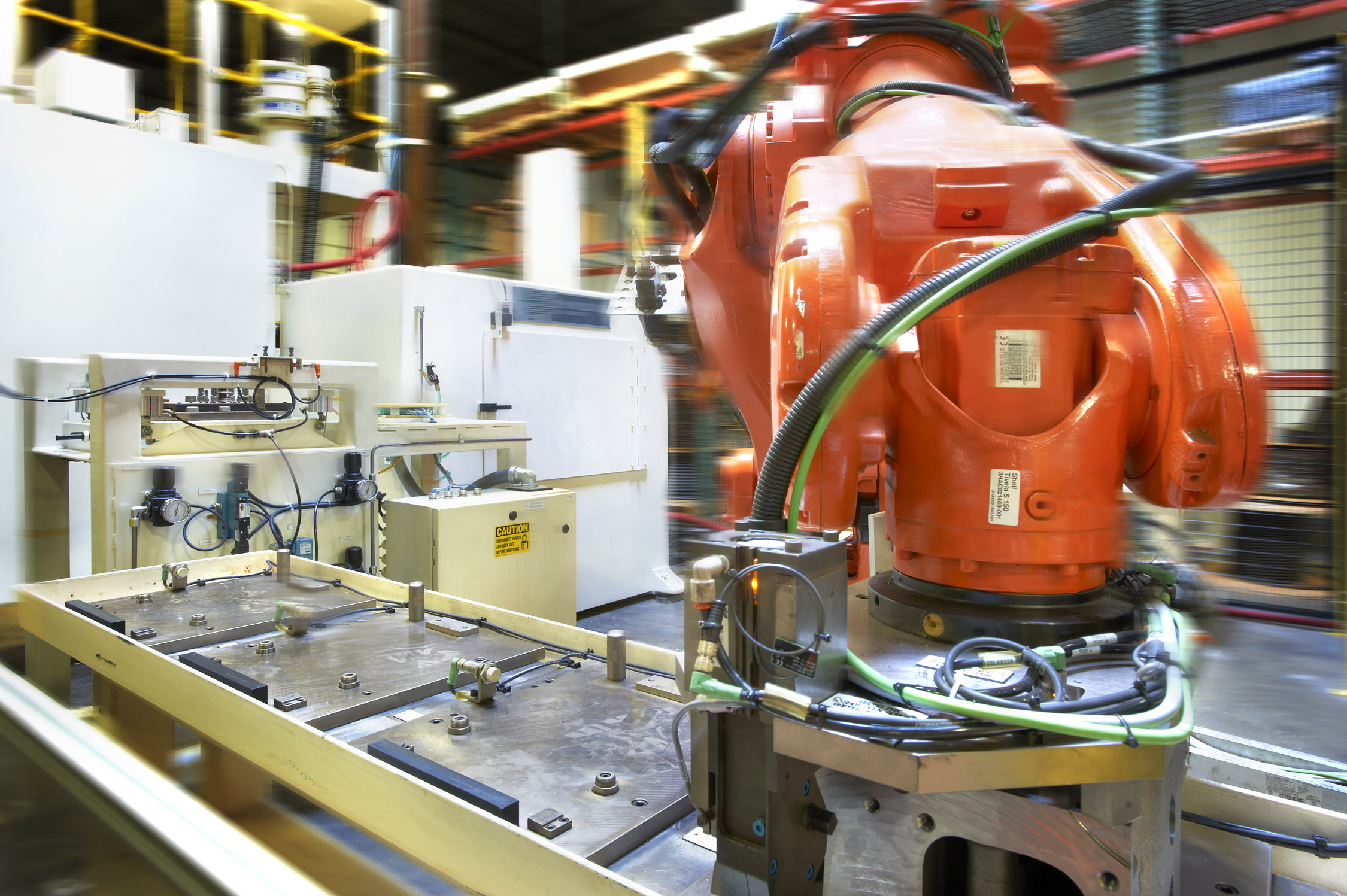
The cylinder heads would arrive in the cell via the infeed conveyor. The track-mounted robot would utilize a Cognex ID camera to scan the serial number which allows the system to know which of the four head types is being processed. The robot would then pick the part off the conveyor and place it in a post-machining washer to clean the part. This cleaning is necessary as the parts are assumed contaminated with machining coolant and waste materials from the machining process. Parts are cleaned two parts at a time in this 140-150°F heated washer. A rust-preventative chemical solution will be used in this washer. A heated drying cycle is also part of this washer to minimize water carryover on the part.
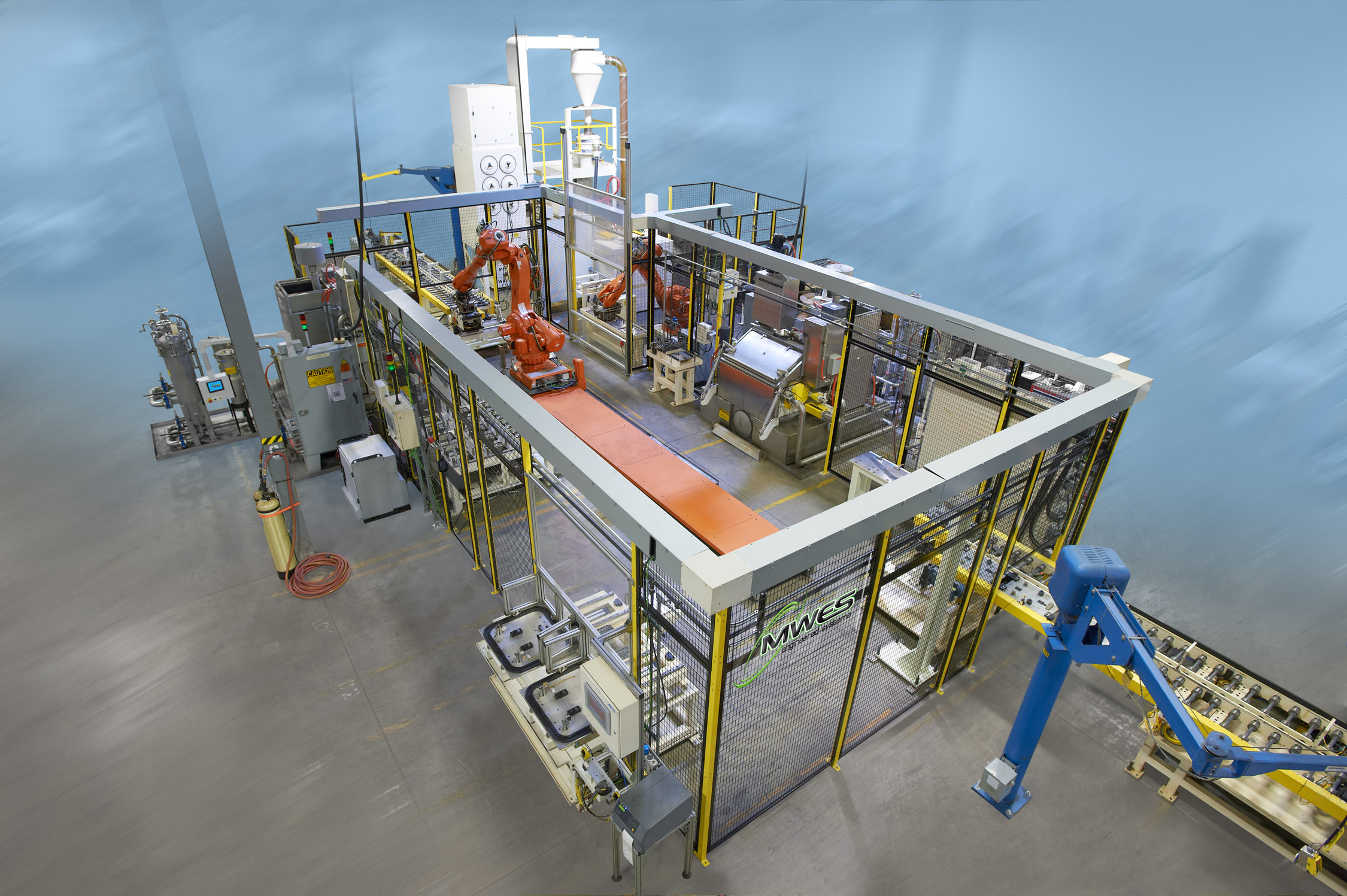
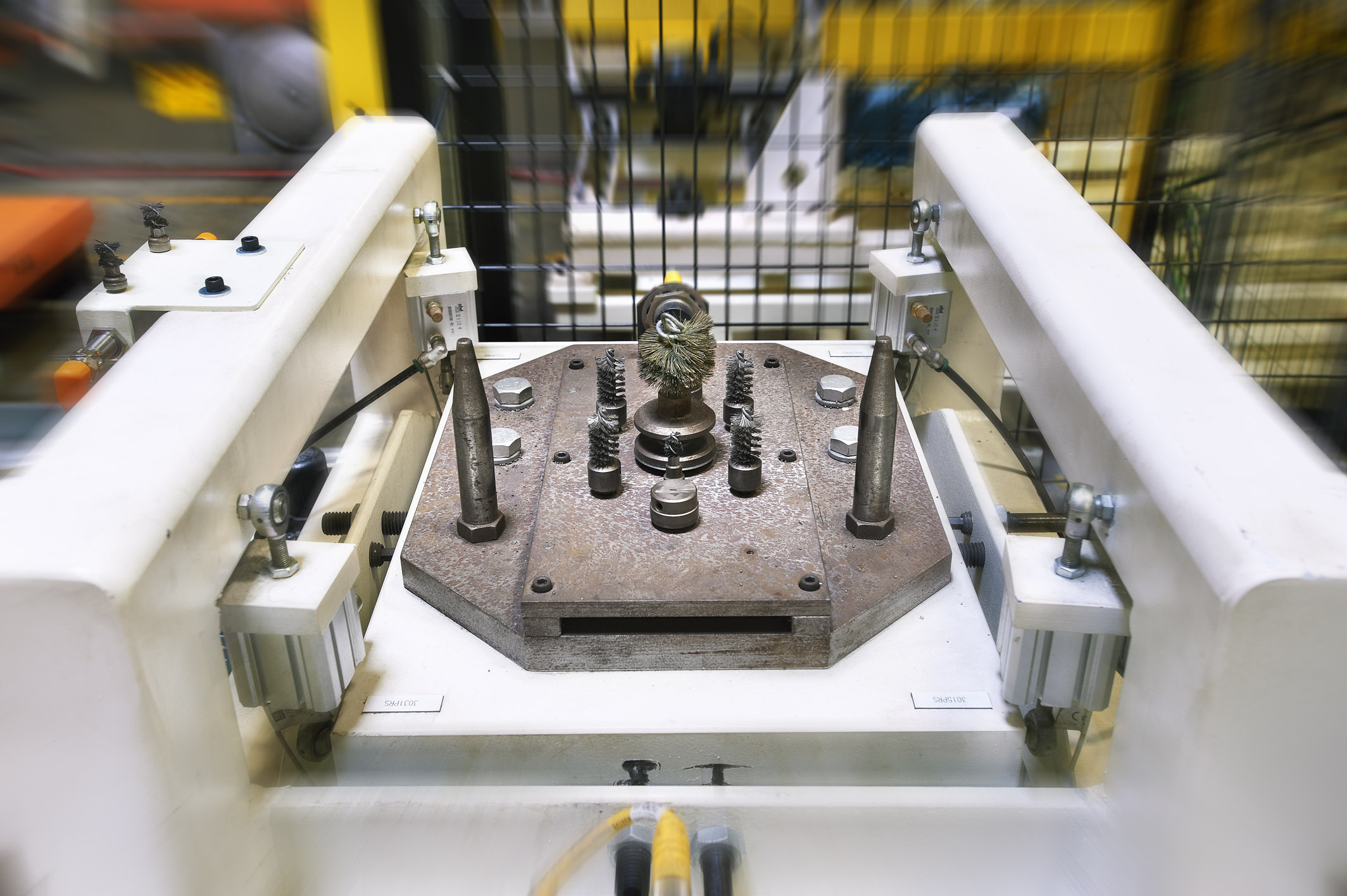
The track-mounted robot would then move the engine head from the washer to the shot peen buffer rack. The shot peening robot would take the heads and lower them into a plug insertion station. After the plugs are inserted the robot raises the part straight up and moves it plug insertion check station that checks to make sure the plugs are seated correctly. If all the plugs are present, the part is transferred to the shot peening blast enclosure and placed inside.
Once the peening is complete the part is removed from the enclosure and the part is moved to the plug check station to ensure that all the plugs are still present before being removed at the next station. Once the plugs have been removed the part passes through a post shot peen washer to clean off any remaining debris. The robot delivers the part to the shot peen transfer rack. The track-mounted robot picks up the part and moves it to a cooling rack. After a designated amount of time, the robot will finally pick the part off the rack, flip the part and then place it on the outfeed conveyor.



Impact to the Customer
The fully automated robot cell MWES provided our customer with a process that could handle four different part variations and an average cycle time of 3 minutes per cylinder head.
Midwest Engineered Systems has a wide range of experience building assembly line automation systems. If you’re looking to improve your automation throughput, we have the knowledge and experience to make the project a success.
Contact us to learn how Midwest Engineered Systems can automate even your most complex and challenging operations today!
Innovation Through Automation
Client Details
A global leader in manufacturing industrial equipment and vehicles.