
Robotic Chamfer Grind System
- Home
- Recent Projects
- Robotic Chamfer Grind System

Project summary
MWES provided this firm with a robotically automated system to perform material removal operations on carbide blanks.
The Challenge
With the business’ current risk of work-related injuries being so high and the overall effectiveness of the previous system low, the present machine was starting to become more of a risk than a reward. This firm was looking to automate their existing carbide blank system, due to the slowness and risk of work-related injuries.
From analyzing and understanding the firm’s current production process, and use for the machine, MWES engineered an automation system that took advantage of innovative technology that addressed all of the current production issues.
The Solution
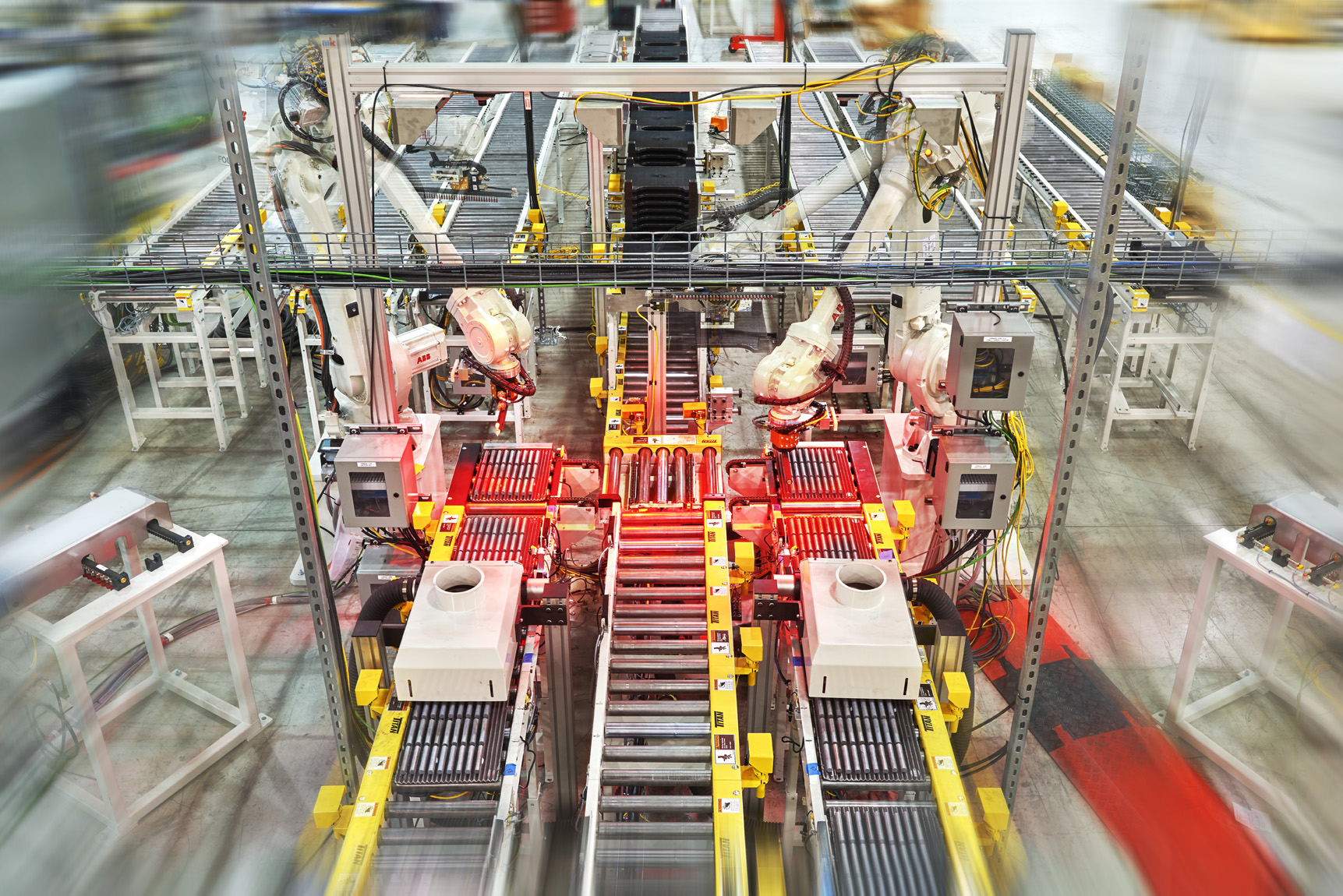
MWES’s complete automated system included two high-tech industrial ABB robots, four chamfer grinders, and a complete product packaging system. The new automation solution was precisely engineered to fit in the footprint of the current system, without reengineering their plant layout.
Parts arrive at the system in trays that can be loaded into the system. The MWES automation solution then uses one of the cell’s robots to move to the Feedall conveyor or Shuttle Table pickup position to await the next part to be presented in the trays.
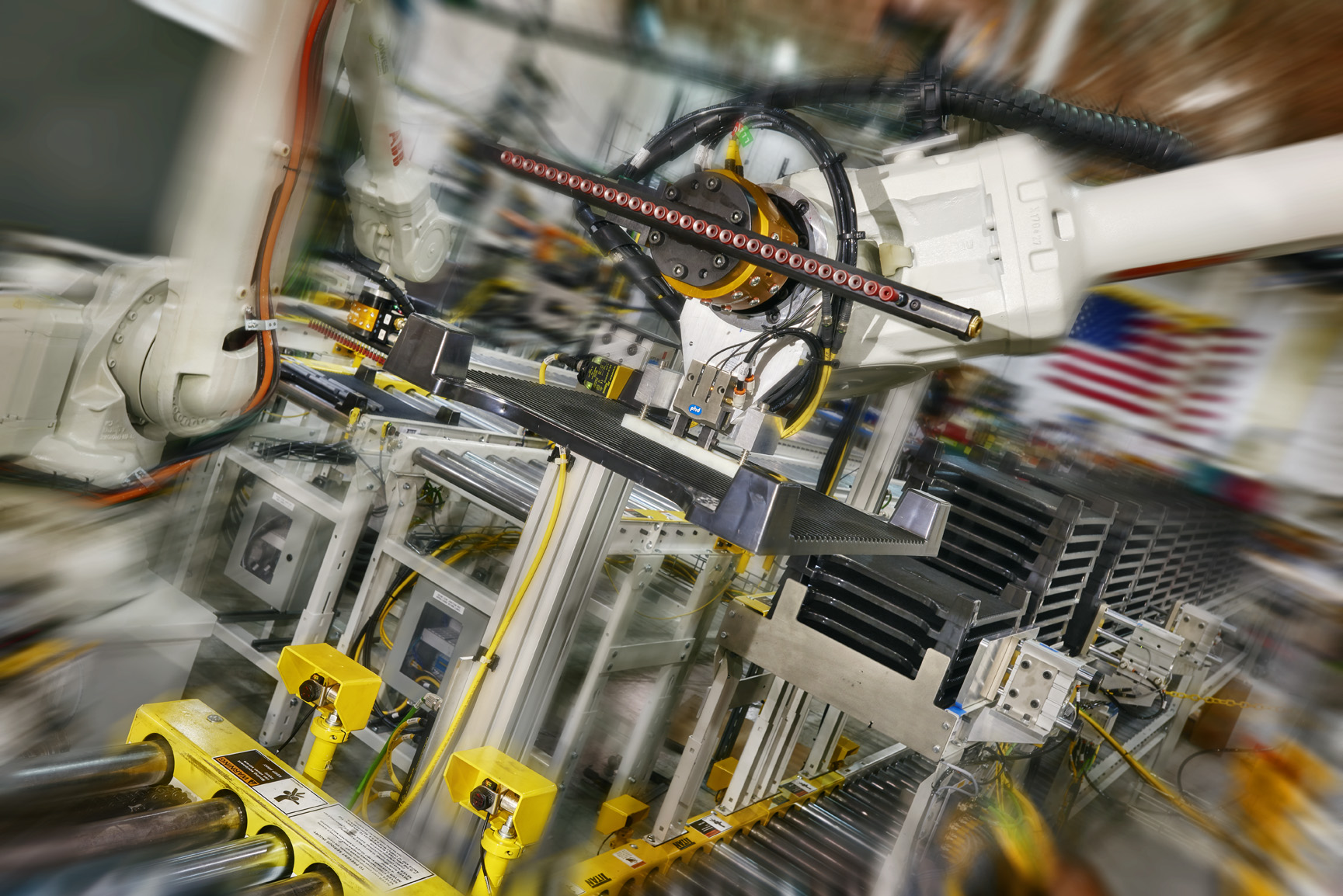
After the part is presented, the ABB IRB140 robot grips the part. The gripper unit is a 3-jaw parallel self-centering unit. Once gripped, the automation system’s ABB IRC 5 Controller begins the grinding process. These grinders were internally designed and built by MWES specifically for immense precision. Each grinder is equipped with a 2HP 3450 RPM motor with a common base to reduce footprint.
The grinding process is comprised of several preprogrammed steps that are bespoke to each variant of the parts’ chamfer dimensions. MWES designed a specific end-of-arm tool that rotates the part on the grinding wheel face to achieve the desired chamfer.
Upon completion of the chamfer grinding process, the robot moves the parts to the position shuttle table for inspection. The MWES solution features a Super Sensor for the inspection of each part to ensure the exact desired dimensions. The sensor uses four laser heads to scan the entire surface of the part, upon satisfaction the robot places the part either in one of the customer’s packages or onto the reject chute.
Parts that are placed in the reject chute slide into a static bin. The rejected parts are then disposed of from the bin by an operator. The process is repeated until all packages are full. The MWES-designed conveyor system then indexes the pallet of full packages out of the cell and inputs an empty one into the machine for loading.





Impact to the Customer
The automation system solution that MWES engineered featured many process improvements and features that helped the new automation system see an increase in speed over the previous heavily manual system.
The stacking trays that hold the round tools are now automated in a larger quantity reducing cycle time. The new system sorts and packages the parts into boxes which decreases labor costs by automating the process in place of handpicking the parts. The palletizing capability of the new system also reduces the risk of forklift-related accidents when transporting loose parts.
Midwest Engineered Systems has a wide range of experience in building robotic grinding systems. If you’re looking to improve your manufacturing throughput, we have the knowledge and experience to make the project a success.
Contact us to learn how Midwest Engineered Systems can automate even your most complex and challenging operations today!
Innovation Through Automation
Client Details
An American supplier of tooling and industrial materials founded in 1938.