
Robotic Painting System Retrofit
MWES retrofitted and upgraded a robotic painting system to replace an existing manual painting...
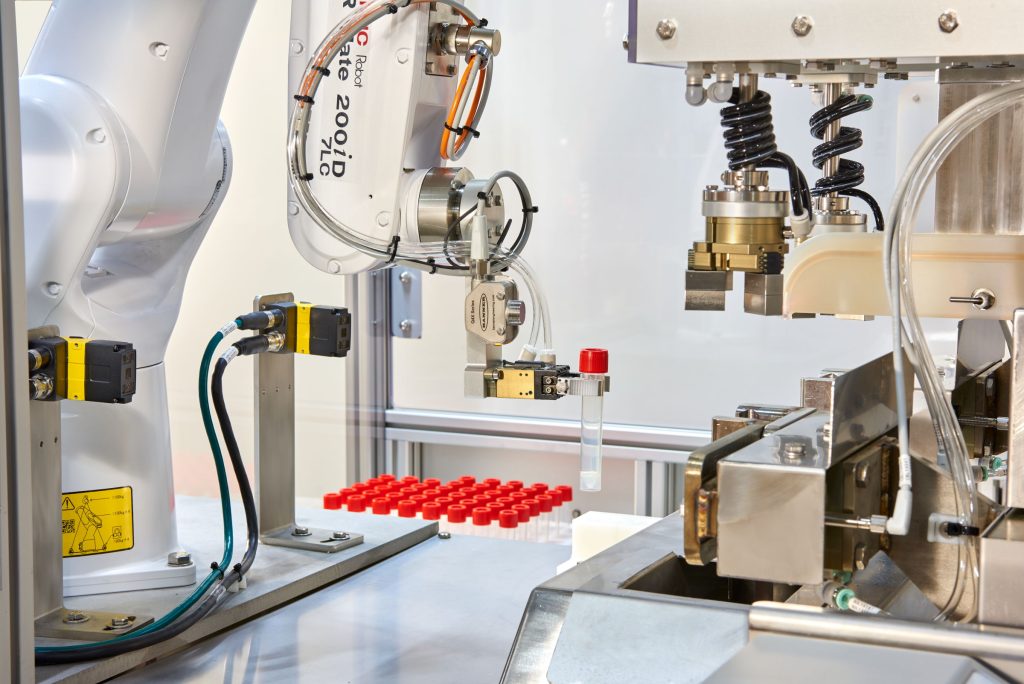
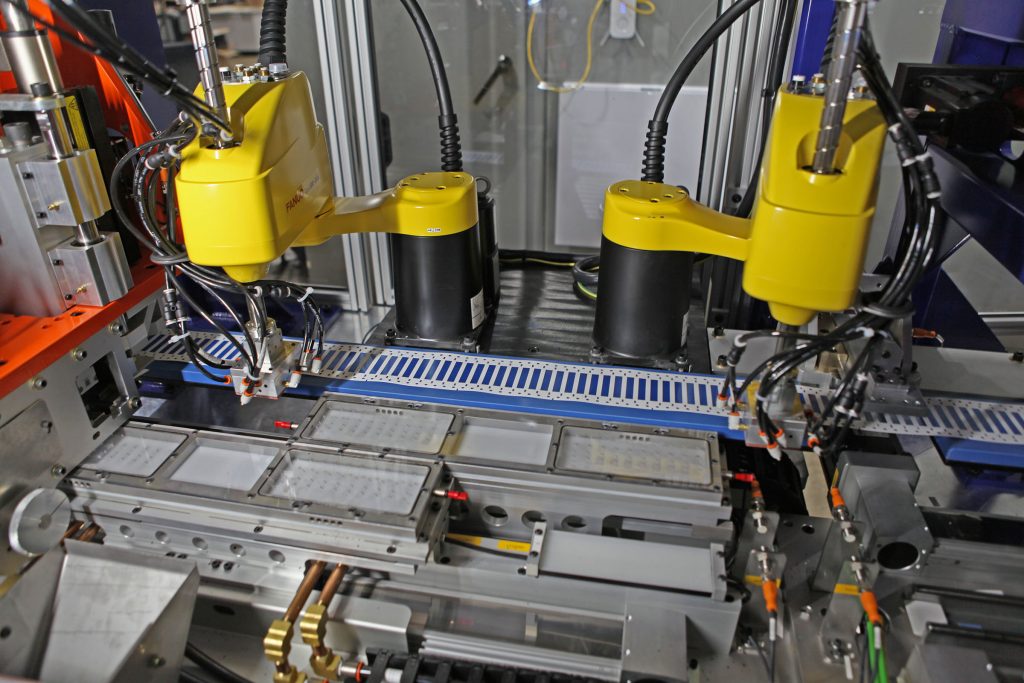
Robotic Vial Filling for Increased Speed & Precision
MWES built a robotic medical sample-handling machine for a healthcare equipment supplier for...

Robot Die-Cast Machine Tending Automation
MWES provided a manufacturer with an automated robot die-cast tending system for producing...

Random Bin & Dynamic Conveyor Picking System
MWES provided an industrial equipment manufacturer with an automated robotic picking conveyor...
Robotic Press Brake Automated Metal Bending
MWES provided this firm with a robotic press brake tending automation system that would perform...
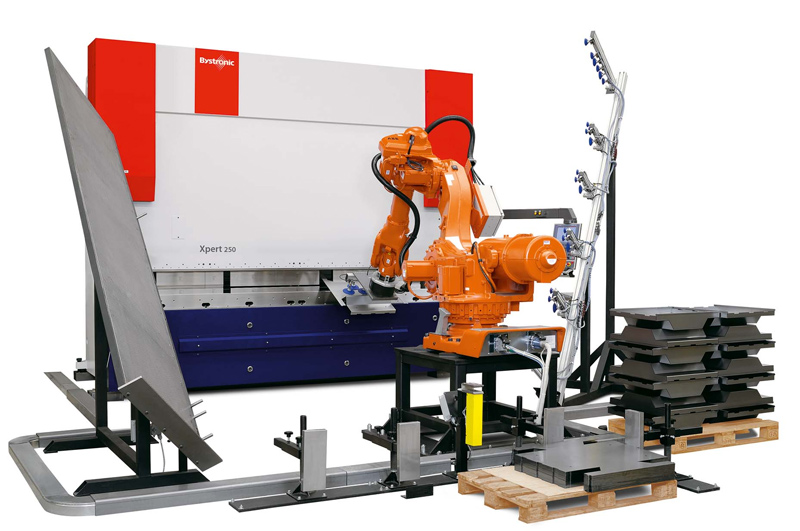
Robotic Press Brake Tending
MWES provided this firm with a robotic Bystronics press brake tending system for handling large...

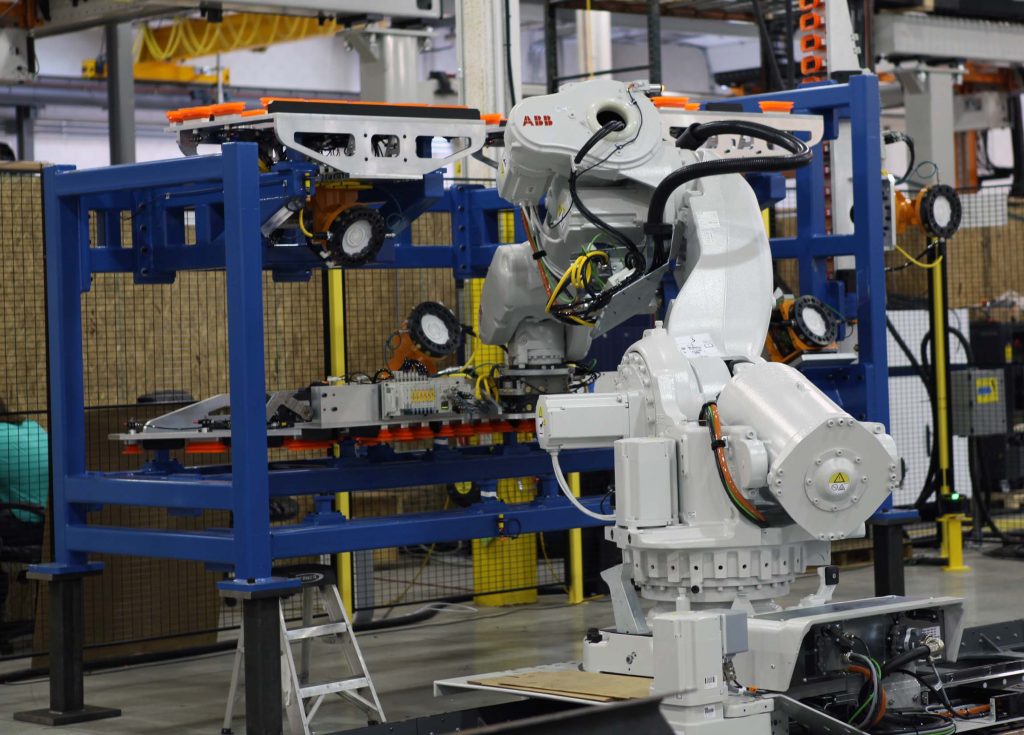
Robotic Press Brake Tending System
MWES provided this manufacturer with a robotic press brake automation system that assembles...

Robotic Flame Treater System
MWES reprogrammed and converted an existing robot cell into one that performs flame-treating...

Robotic Stack Handling System
MWES provided a packaging manufacturer with an automated bagging system for stacks of thermal...