Assembly & Automation
Whether you’re exploring your first automation project, upgrading an existing production line, or looking for long-term service and support, our team is ready to help. Tell us about your goals and we’ll connect you with the right automation expert.
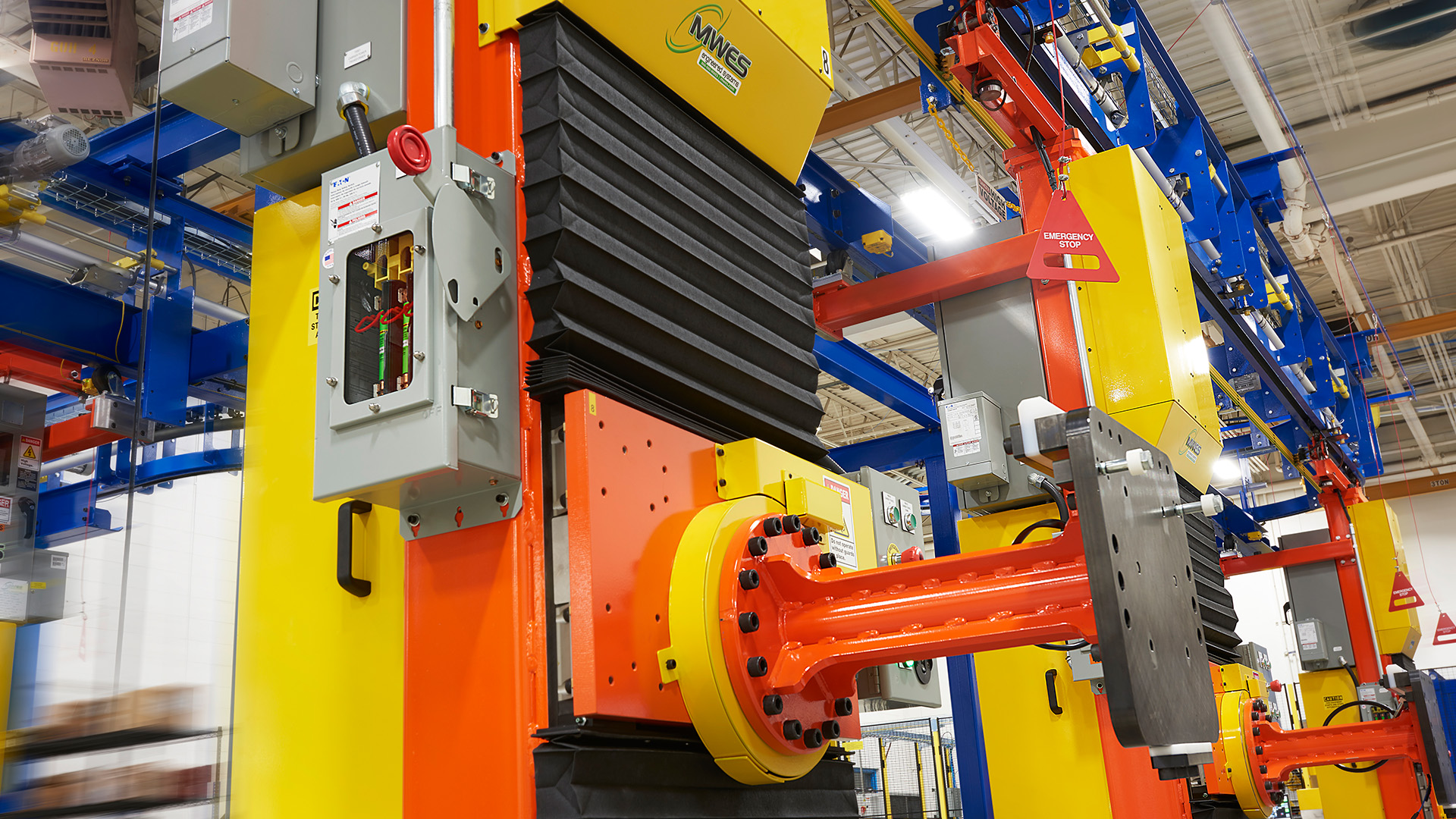
Custom Assembly & Automation Systems That Drive Productivity
At MWES, we design and build fully integrated automated assembly systems that solve your most demanding production challenges. Whether you’re launching a new product, increasing your throughput, or optimizing an existing process, we deliver purpose-built solutions from concept to commissioning. Our multidisciplinary engineering team—spanning robotics, controls, and mechanical design—applies a data-driven approach that includes Proof of Principle (POP) to validate process capability and ensure robust system performance. By integrating in-line and end-of-line testing strategies, we help manufacturers achieve consistent quality, tighter tolerances, and greater reliability throughout the production lifecycle.

Streamlined
Production
Streamlined Production
Accelerate throughput, reduce cycle times, and eliminate inefficiencies with automation systems engineered to drive consistency and productivity across your entire operation.
Custom-Engineered
for Your Needs
Custom-Engineered for Your Needs
Every MWES solution is designed around your product, your process, and your facility layout. No off-the-shelf compromises—just intelligent, scalable systems built for your exact requirements.
Proven Across
Industries
Proven Across Industries
We’ve successfully delivered automation solutions across industries including automotive, aerospace, consumer goods, military, and food production—earning a reputation for innovation, precision, and long-term value.