



The Challenge
Labor-Heavy Beam Handling Slowing Paint Line Efficiency
Manually loading and unloading large steel beams was inefficient, physically demanding, and limited the customer’s production capacity. To stay competitive and scale operations, the customer sought an automated tending solution.
- Steel beams ranged from 4 to 12 feet long, weighing up to 80 lbs each
- Required robotic loading onto and unloading from a paint line carrier system
- Palletized unloads needed wooden stick separators between beam layers
- Needed consistent 15-second per-beam throughput to match production pace
This system had to reduce manual lifting, maintain high throughput, and handle complex part positioning—all while working with existing paint line infrastructure.
The Solution
Six Fully Automated Robot Cells for Paint Line Loading & Unloading
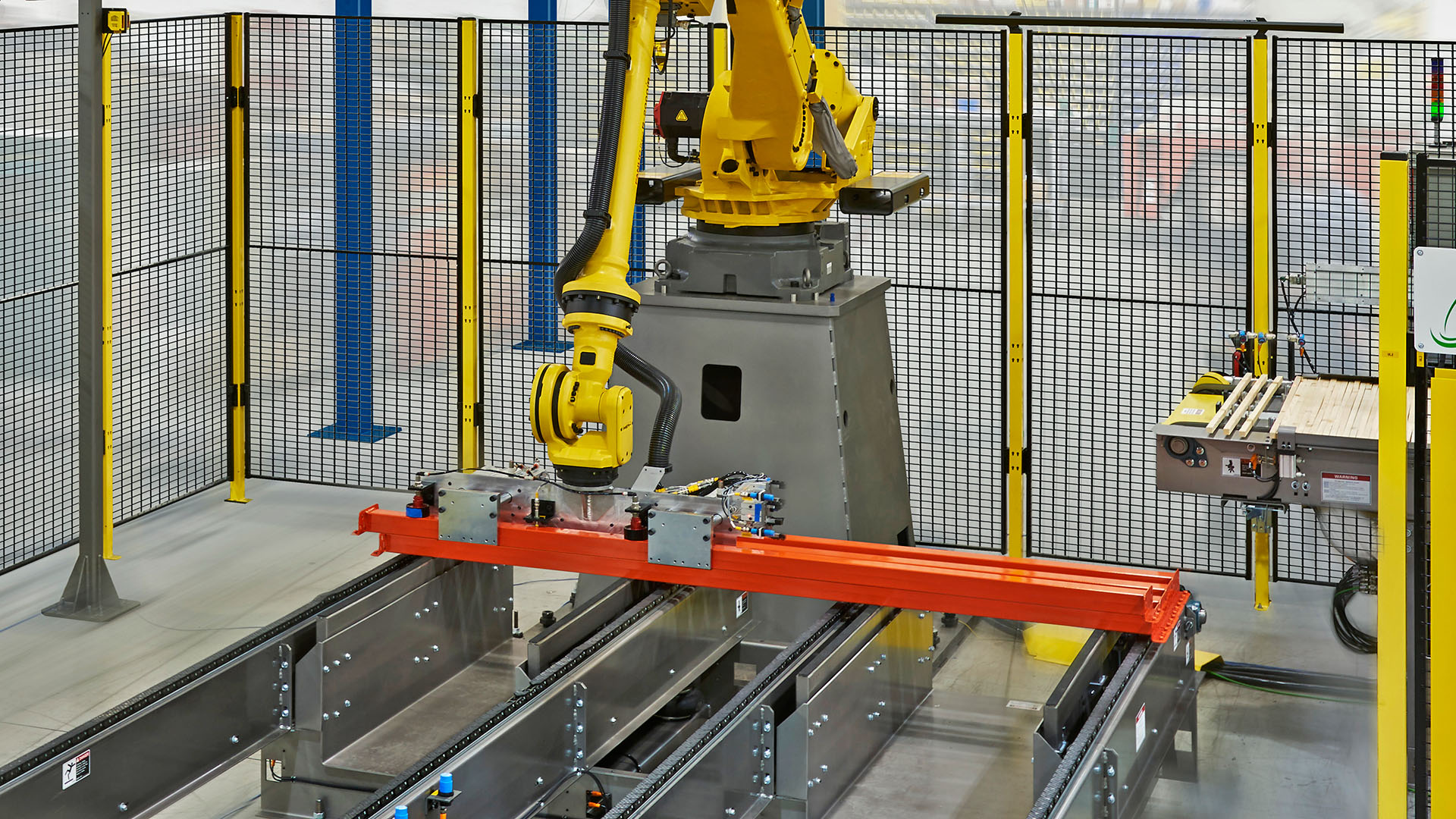
MWES engineered a six-cell robotic tending system using high-payload robots and smart material handling integrations to automate beam loading and unloading from the paint line.
- 3 load cells place unpainted beams onto paint line carriers
- 3 unload cells remove painted beams and stack them with wooden separators
- Each cell uses a FANUC R-2000iB/185L robot with vacuum/magnetic grippers
- Titan Chain Conveyor System manages beam stacks post-palletization
- Integrated wood stick feeder automates layer separation during stacking
The system requires minimal operator intervention—just basic replenishment and manual banding at the final unload zone—while delivering consistent, safe performance.
This modular system design allows for smooth operation, smart stacking logic, and future expansion as production needs grow.
The Results
Consistent Output, Safer Workflows & Reliable Cycle Times
MWES’s robotic solution gave the customer a high-speed, labor-efficient alternative to manual beam handling—without compromising quality or safety.
- Achieved 15-second per-beam cycle time across all six robot cells
- Significantly reduced manual lifting and ergonomic risk
- Maintained consistent paint line throughput and process timing
- Minimized operator duties to simple feeder loading and banding
The customer now benefits from a scalable, repeatable automation solution that ensures reliable results every shift—day after day.












{kind=link}
{kind=link}