
Disposable Silverware Napkin Wrapping Automation System
- Home
- Recent Projects
- Disposable Silverware Napkin Wrapping Automation System

Project summary
MWES provided this firm with a robotic automation system that wraps disposable silverware in a napkin and case packs the final products.
The Challenge
This firm manufactures disposable silverware and sells its products in a variety of configurations from bulk boxes of cutlery to individually wrapped place settings. Their process for assembling place settings required an abundance of labor to perform. Before automating its process, the customer employed a handful of contract assembly firms that employed workers to manually collate and package its silverware sets. Even by using several outsourcing firms, the demand for the silverware sets was outstripping the supply of available labor to make them. Rather than continuing to rely on several firms providing manual labor to satisfy the growing demand, the customer decided it was time to investigate if the process could be brought back in-house with some well-conceived automation.
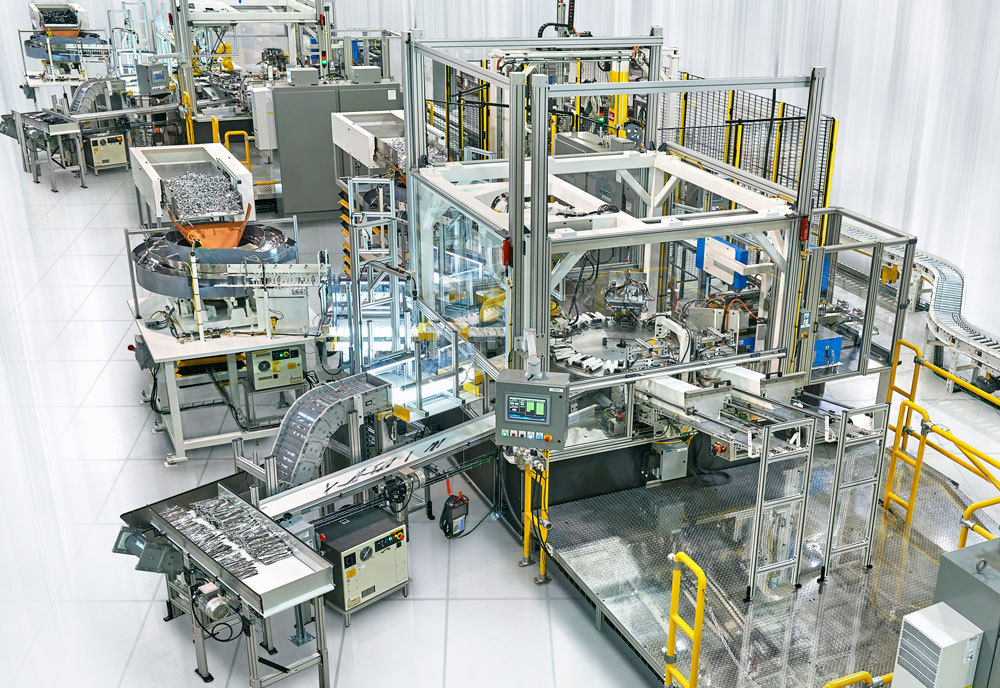
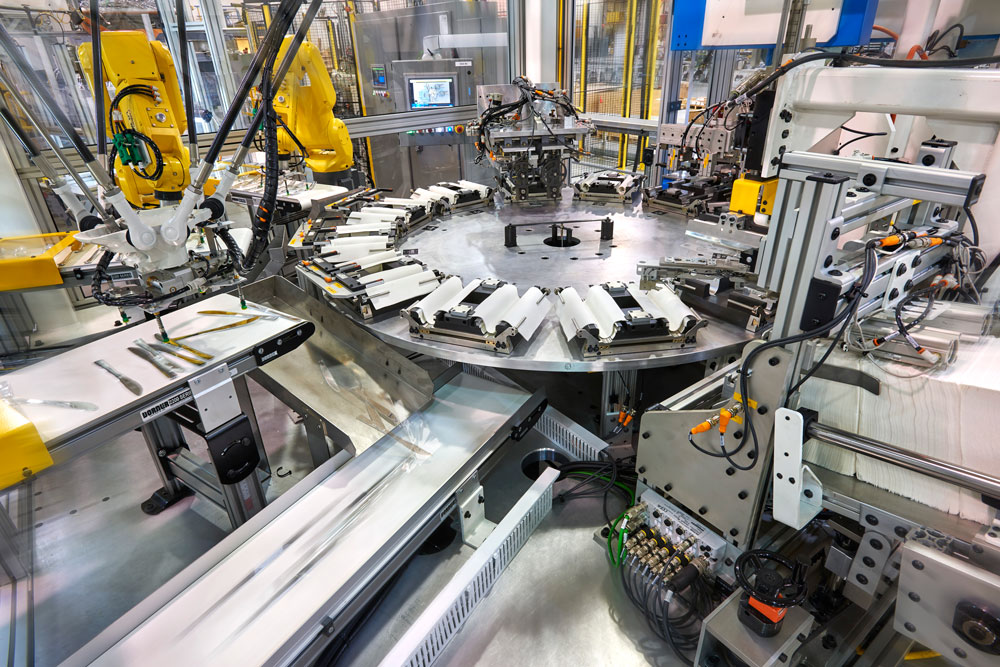
The goal is to automate the assembly, staging, bagging, case loading and conveyance to the palletizing operation of individual plastic silverware settings wrapped in a disposable napkin. The system incorporated both robotic and non-robotic automation, including two multi-robot silverware wrapping machines, automatic bagging and case packing systems, and conveyor systems to the palletizer cell. Each place setting contains a knife, fork and spoon wrapped in a disposable napkin. The trials of assembling and packaging the place settings is what brought the customer to MWES.
The Solution
The robotic automation system MWES built for our customer requires very little human tending. An operator is needed to load each utensil type (fork, spoon and knife) into its associated bulk feeder hopper, and napkins and banding into their automatic feeders. Additionally, the operator feeds the automatic case erector and the bag machine at the end of the assembly process. Using Allen Bradley CompactLogix Ethernet-enabled PLCs at the heart of the system control, the automation system is essentially autonomous.
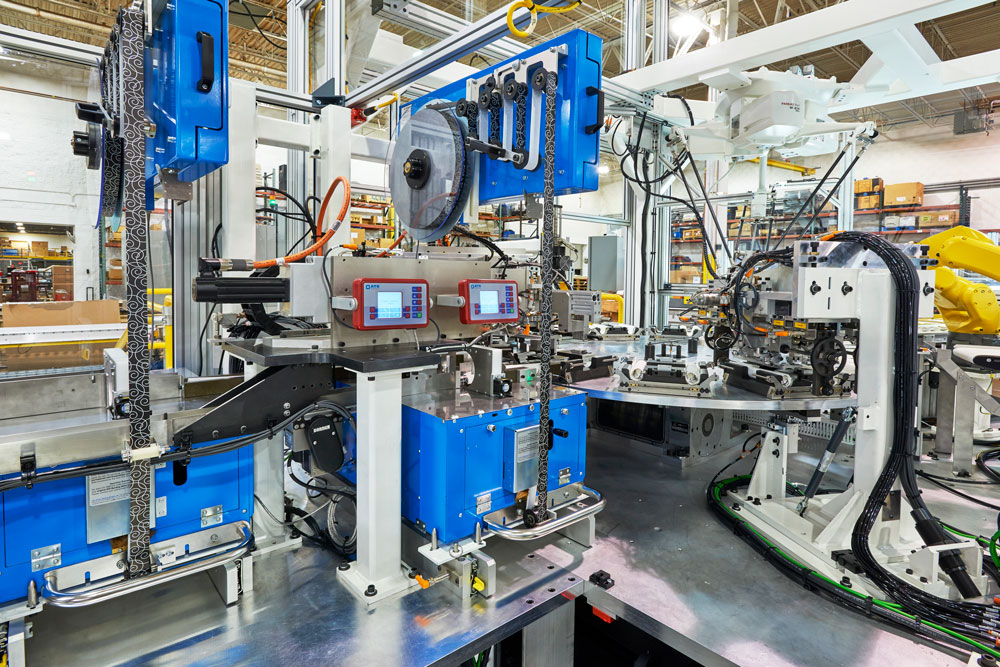
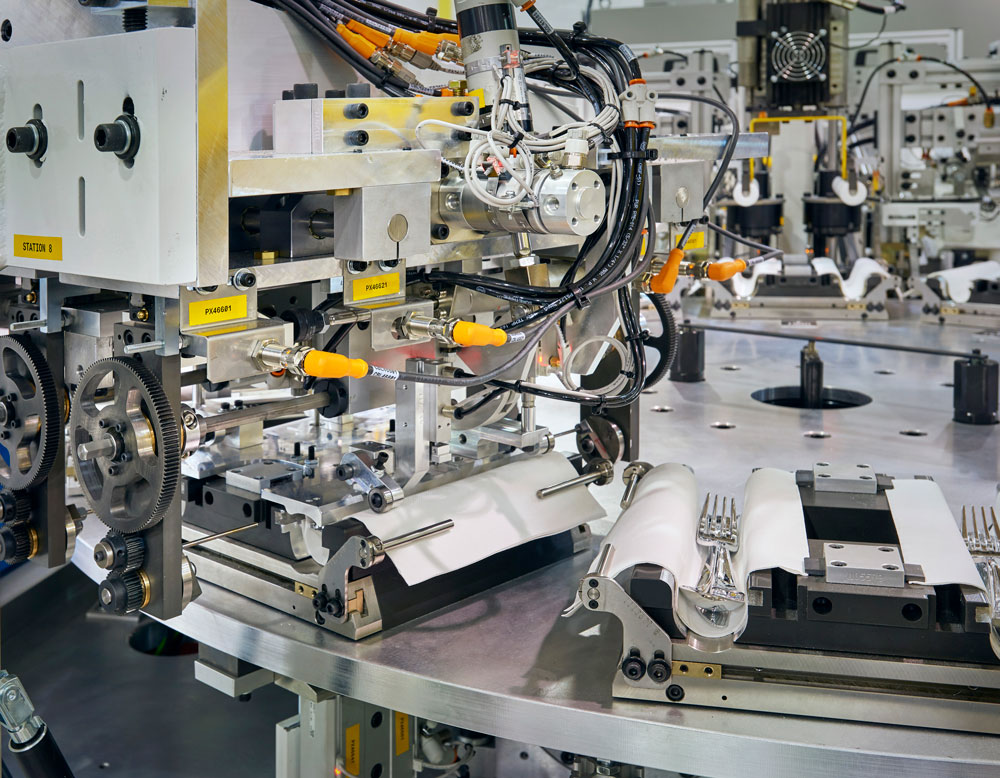
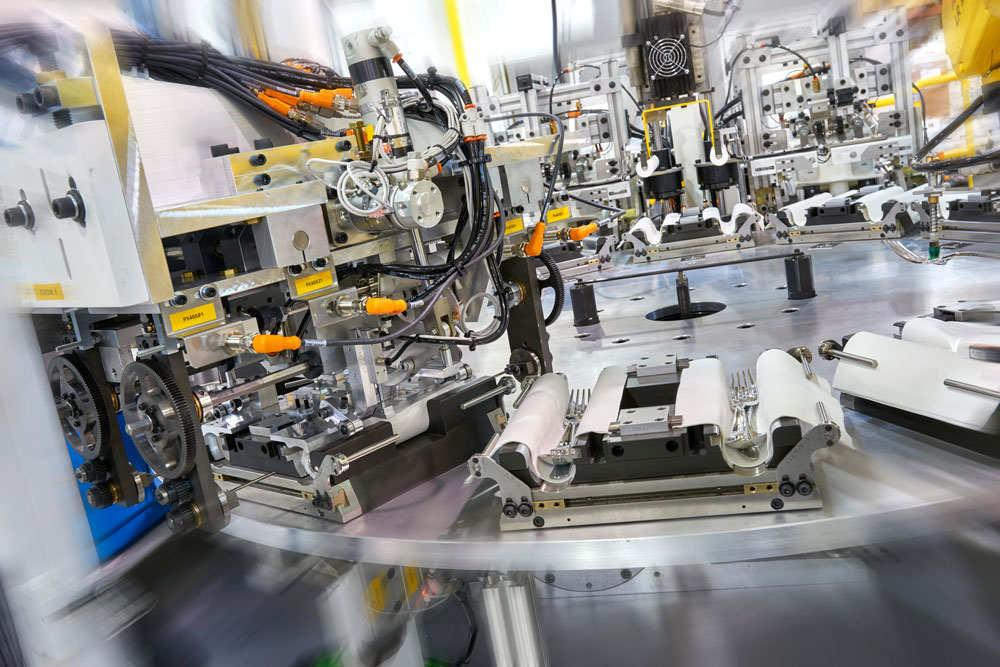
The automation process begins when the operator loads each type of utensil and the napkins into their associated bulk bowl feeders or step feeders. The utensil feeder then feeds the utensils onto a robot utensil picking conveyor and the automatic napkin feeder places one napkin into the respective pocket of the two-pocket locating fixture on the dial table. The two-pocket locating fixture lowers to capture each napkin between the table and the fixture. Once the utensil is within the picking area, the robot tracks and picks the utensil from the conveyor. The robot orients the utensil to the proper position and places the utensil onto one of the napkins in the dial table fixture. The pick and place process is repeated so that each pocket of the two-position fixture has a utensil. For all three utensil-picking robots, if for any reason a utensil is getting close to leaving the robot pick zone before the robot can pick it, a recirculation conveyor will return it to the beginning of the robot-picking conveyor.
The dial table indexes the completed set to the wrap position where a dual-forked tool extends to grip the napkins and utensil sets and simultaneously rolls the napkins around the utensils to close the set and lowers them into the banders. The banders grip the wrapped utensil sets and the dual-forked tool retracts from the banders. The banders cut a strip of banding material, loop it around the wrapped set, and seal the edge of the band via an overlapping heat-activated seal. Banded utensil sets are then ejected from the banders onto a conveyor for accumulation and bagging.
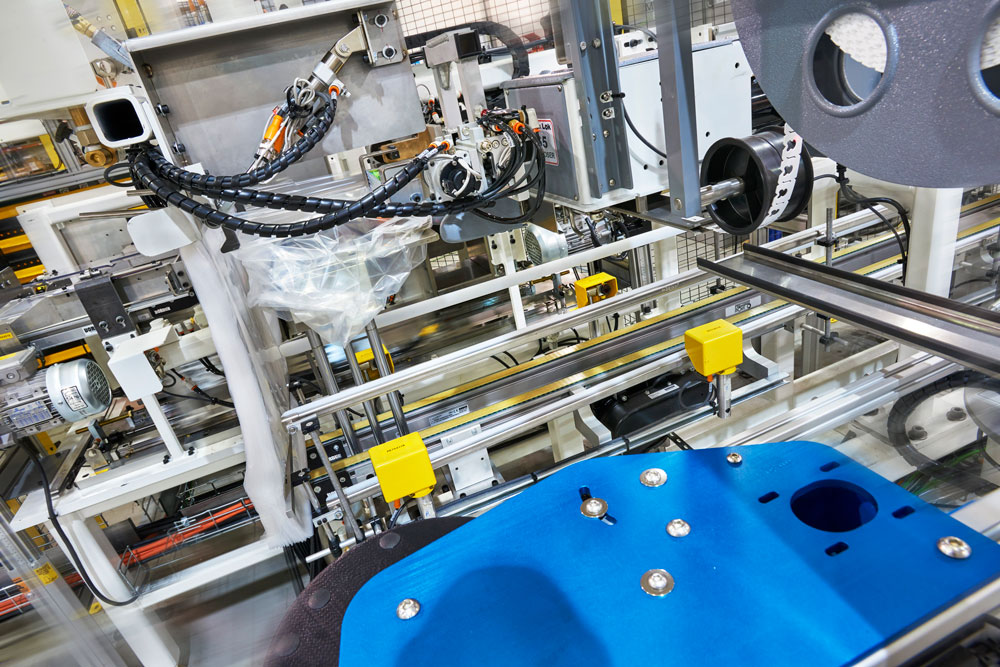
The system operator manually loads the automatic case erector infeed and an automatic case erector erects the boxes and feeds them out to the automatic bagging and case packing system with the bottom taped and the top flaps open. Additionally, the operator loads bags into the automatic bagging machine. Once 50 assembled pieces are in the main hopper, the hopper dispenses the 50 wrapped utensils into a bag. The full bag is sealed and separated from the other bags and transferred into the case packing station. When two full bags are in position for case packing, both bags are inserted into the case underneath. The full case is transferred down the main conveyor line where it goes through a top taper and barcode reading stations. The barcode reader identifies the case and tells the palletizing robot what case it is to palletize before it arrives in the palletizer cell.









Impact to the Customer
With the installed automation system, MWES was able to reduce the number of human labor from what would previously take 10-20 people to just 1 to 2 internal machine operators. The production throughput was also greatly increased, allowing the company to see a 100 piece-per-minute production speed – a speed unreachable even with the quantities of human labor previously available.
In the future, the system is designed to be expandable up to six silverware wrapping machines and handle five variations of product for palletizing as the customer’s demand increases. While the increase in production and the vastly reduced reliance on human labor were pivotal to the success of the project, the vastly reduced production fluctuations yielded greater forecasting stability and more reliable order fulfillment.
Midwest Engineered Systems has a wide range of experience in building automated assembly line systems. If you’re looking to improve your assembly line throughput, we have the knowledge and experience to make the project a success.
Contact us to learn how Midwest Engineered Systems can automate even your most complex and challenging operations today!
Innovation Through Automation
Client Details
A manufacturer of disposable silverware and accessories based in Oshkosh, WI.